


产品中心
新闻资讯
本文提出一种多子带相干累积(MSCA)算法,通过引入空带和子带相干处理,解决DDMA-MIMO雷达的多普勒模糊与能量分散问题。该方法在低信噪比下显著提升检测性能,实测验证可有效恢复目标速度,适用于车载雷达高精度感知。
随着智能交通系统和自动驾驶技术的快速发展,车载毫米波雷达已成为环境感知的核心传感器。调频连续波(FMCW)技术因其结构简单、成本低廉、距离速度分辨能力强等优势,在77 GHz车载雷达中得到广泛应用。结合多输入多输出(MIMO)技术,通过虚拟阵列扩展可显著提升角度分辨率。
传统MIMO雷达主要采用时分多址(TDMA)技术实现波形正交。在TDMA-MIMO系统中,$M_t$个发射天线轮流工作,每个天线的有效脉冲重复频率降低为$\text{PRF}/M_t$。根据多普勒原理,最大无模糊速度为:
其中$\lambda$为波长,$T$为脉冲重复间隔。当采用TDMA方式时,实际最大无模糊速度降至$V_{\max}/M_t$,严重限制了高速目标的检测能力。此外,由于各天线分时工作,总发射功率仅为单天线功率,探测距离受限。
多普勒分多址(DDMA)技术通过在发射端对不同天线施加线性相位调制,使各天线信号在多普勒域正交分离。所有发射天线同时工作,理论上可累积全部发射能量。然而,DDMA-MIMO雷达面临两个核心挑战:
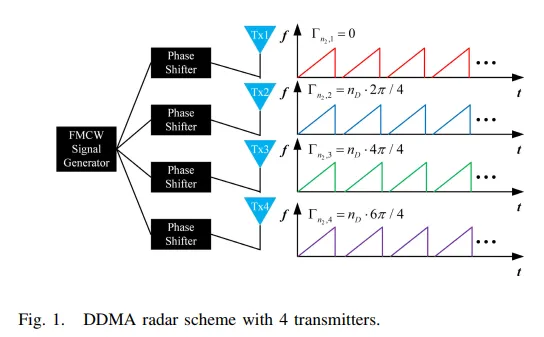
由于相位调制$\Phi_{n_D,m_t}$的存在,同一目标对应不同发射天线的回波在多普勒域产生固定频移:
这导致最大无模糊速度降至$V_{\max}/M_t$,且每个目标在多普勒谱产生$M_t$个峰值,能量被分散。
算法的关键创新在于修改相位调制方式。将多普勒域划分数从$M_t$增加到$N_t = M_t + l$,其中$l$为空带数量。修改后的相位调制为:
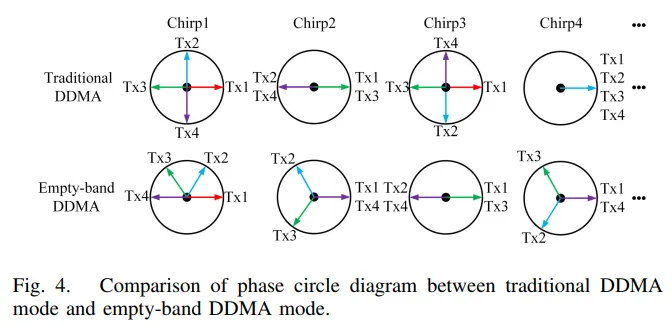
图4描述:图4展示了传统DDMA与空带DDMA的相位圆对比。传统方法中4个发射天线\pi]$圆周上,相邻天线$。空带方法将圆周划分为6份($N_t=6$),但仅使用其中4个相位点,留出2个空带。这种非均匀相位分布是实现速度解模糊的关键。
将距离-多普勒谱沿多普勒维均匀划分为$Nt$个子带,每个子带包含$I{sub} = N_D/N_t$个多普勒单元:
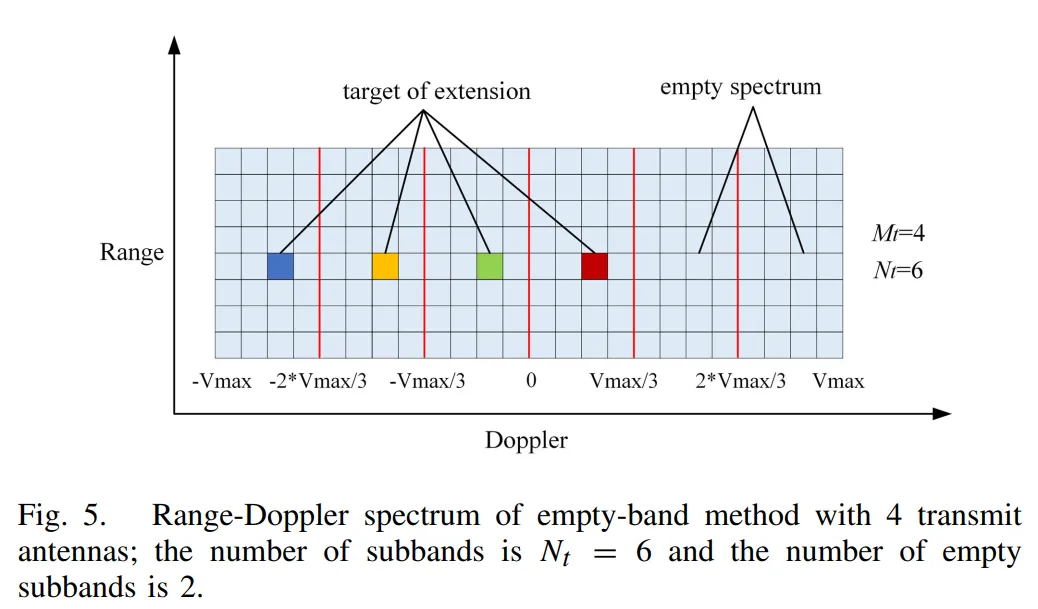
图5描述:图5展示了空带方法的距离-多普勒谱。与图3传统方法对比,可见多普勒域被划分为6个子带,其中子带3和子带6为空带(仅含噪声),4个目标峰值分布在其余4个子带中。空带的能量明显低于包含目标的子带,为后续检测提供了判决依据。
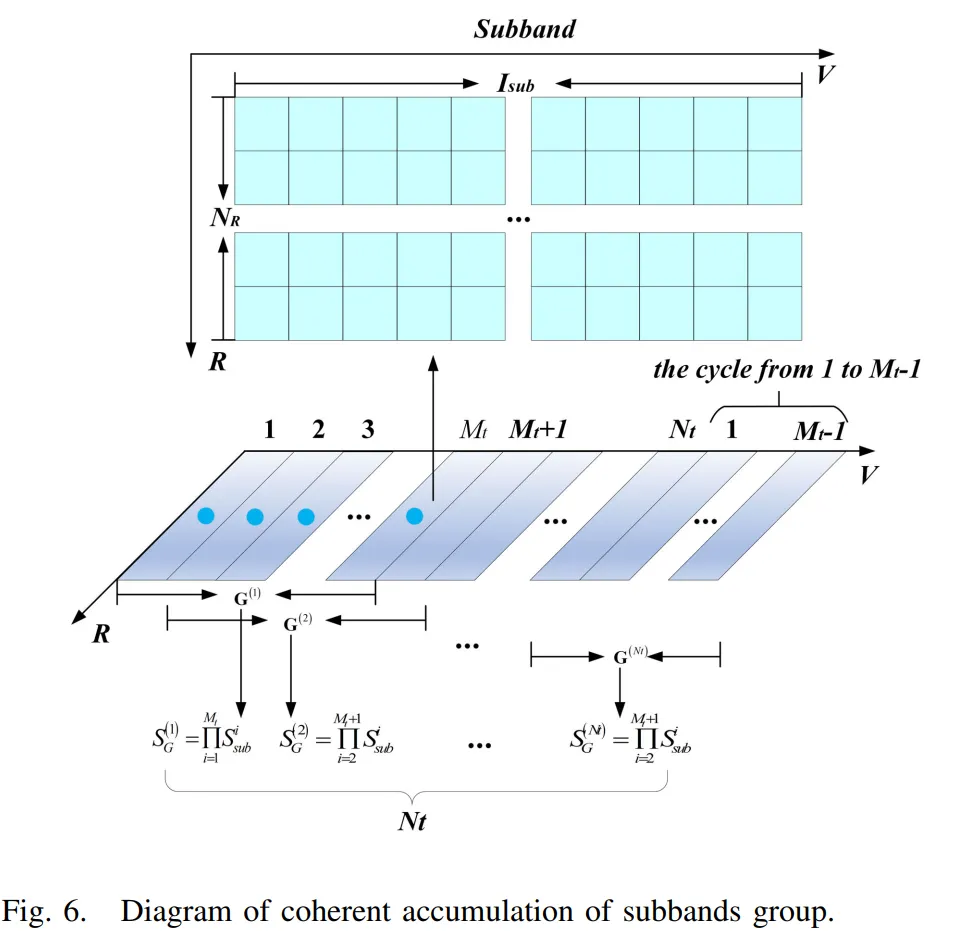
图6描述:图6形象地展示了子带相干累积过程。每个子带组包含$M_t=4$个连续子带,通过滑动窗口方式形成$N_t=6$个子带组。对每组执行相干累积后得到6个累积子带,其中包含目标的累积子带能量显著增强,而包含空带的累积子带能量保持较低水平。
针对多目标场景,不同速度目标可能位于不同子带组,算法采用逐单元能量比较策略:
能量比较:对每个距离-多普勒单元$(R_i, V_i)$,比较其在所有累积子带中的能量:
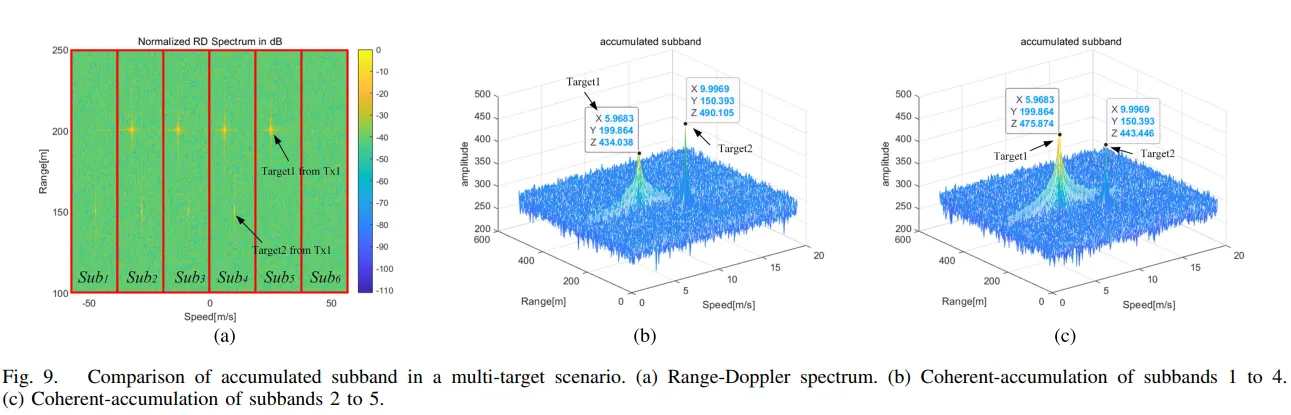
图9描述:图9展示了双目标场景下的处理结果。图9(a)显示原始距离-多普勒谱中两个目标各产生4个扩展峰。图9(b)和9(c)分别显示子带1-4和子带2-5的累积结果。可见目标1在子带2-5累积后能量最强,目标2在子带1-4累积后能量最强,通过比较可正确识别各目标所属子带组。
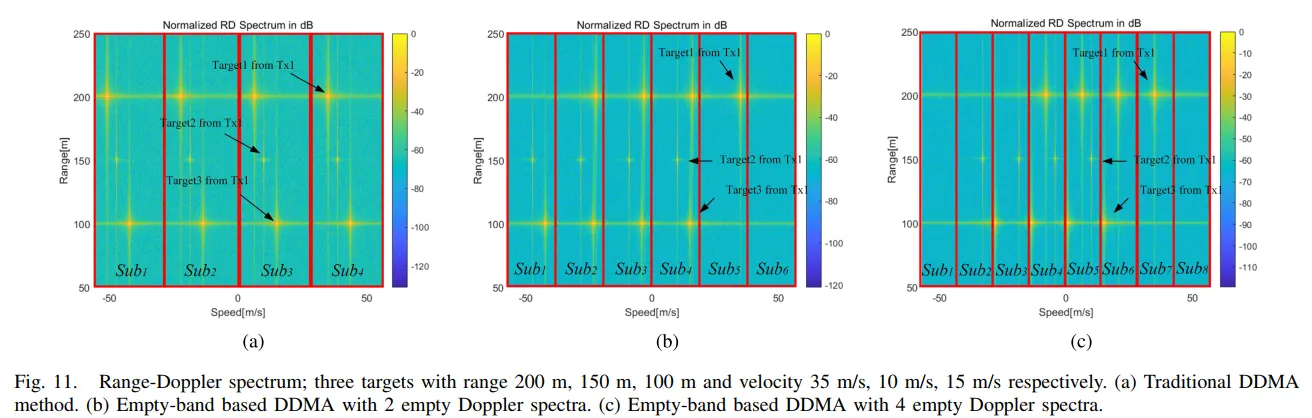
:图11对比了三种方法的距离-多普勒谱。图11(a)传统DDMA方法中,三个目标(200m/35m/s、150m/10m/s、100m/15m/s)各产生4个等间隔扩展峰,速度模糊严重。图11(b)引入2个空带后,不同目标峰值分布在不同子带组中,可实现速度解模糊。图11(c)引入4个空带时,子带宽度过窄,目标可能跨越子带边界,影响检测性能。4.3 性能对比分析
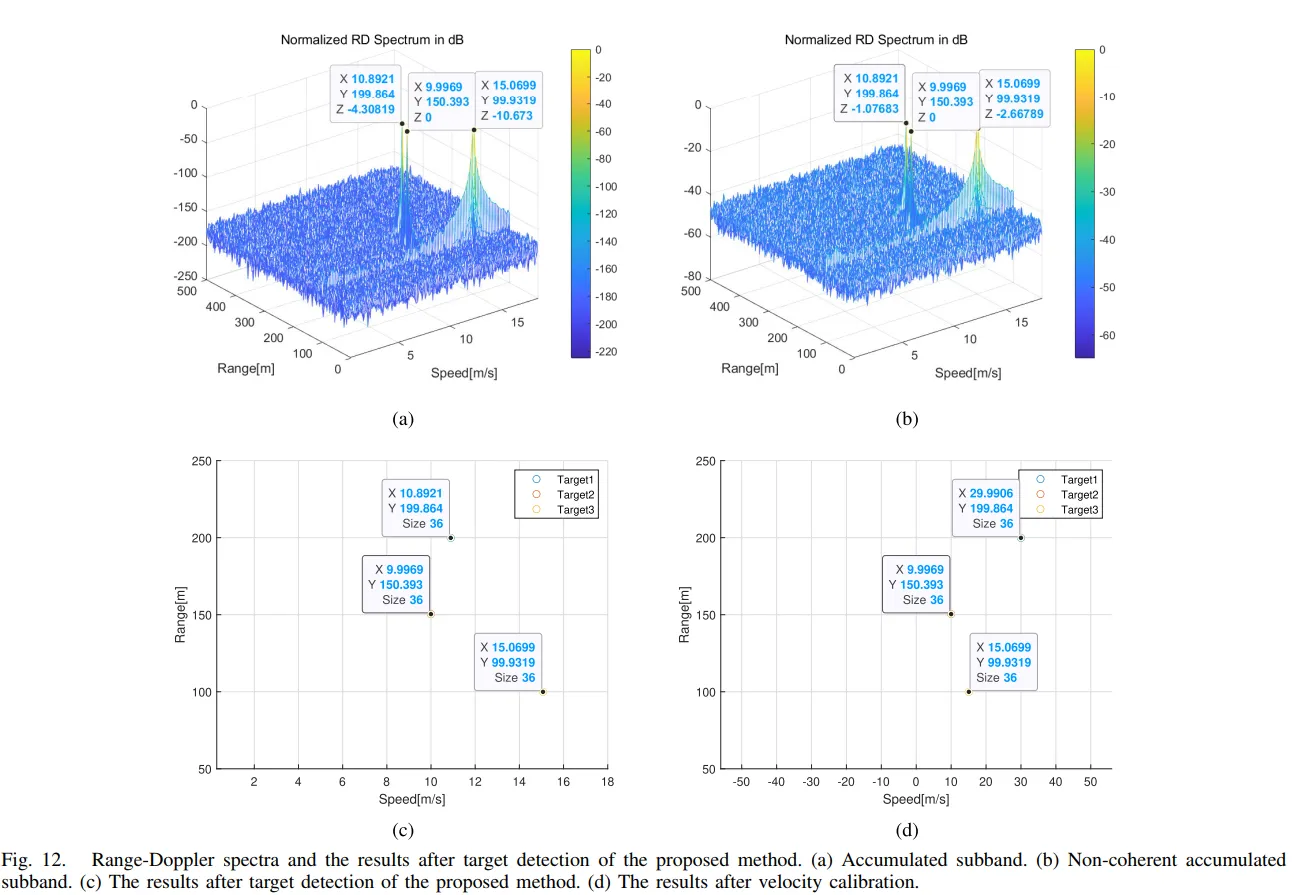
:图12展示了累积处理效果对比。图12(a)为累积子带谱,背景噪声降至-120 dB以下。图12(b)非相干累积结果噪声仅降至-20 dB。图12(c)和12(d)分别为检测和速度校正结果,验证了算法的有效性。
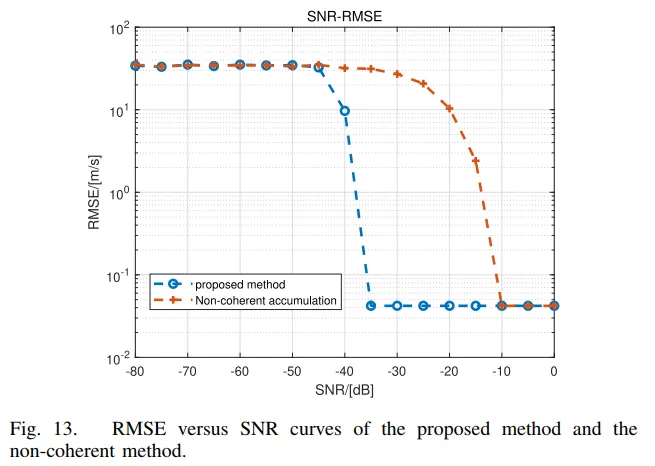
:图13为均方根误差(RMSE)随信噪比变化曲线。MSCA方法在SNR = -36 dB时RMSE开始收敛,而非相干累积方法需要SNR = -10 dB,性能提升26 dB。在极低信噪比(-40 dB)下,MSCA仍保持稳定性能。
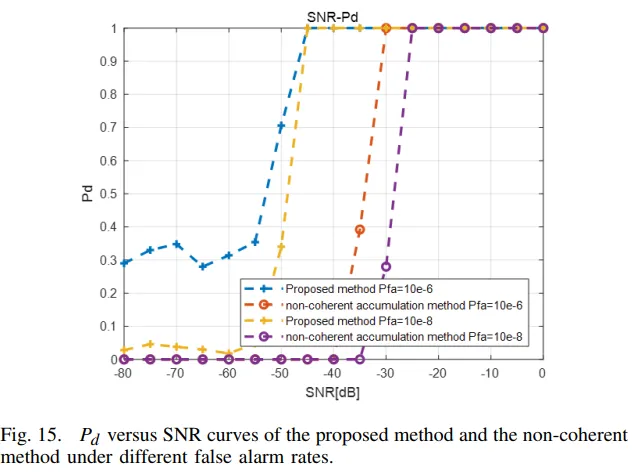
:图15展示了检测概率曲线。在虚警率$P{fa} = 10^{-6}$时,MSCA方法在SNR = -45 dB即可达到90%检测概率,非相干方法需要-30 dB;$P{fa} = 10^{-8}$时性能差距扩大到20 dB,充分验证了相干处理的优势。五、实测数据验证
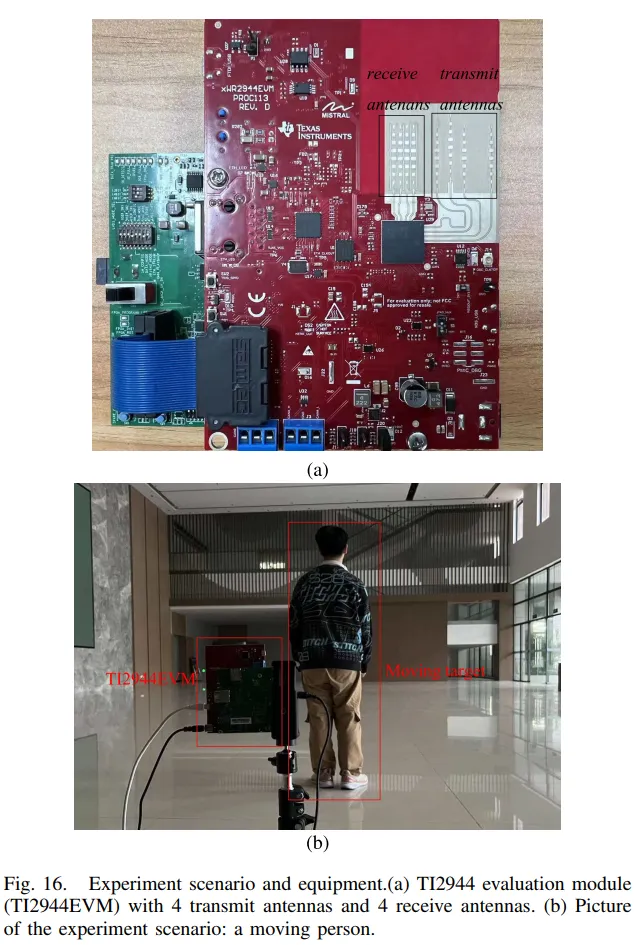
:图16(a)展示了TI2944EVM评估板,集成4发4收天线(b)为实验场景,测试人员在走廊中以约0.9 m/s速度远离雷达。实测参数:载波77 GHz,脉冲时长74 μs,脉冲数64,使用2个发射天线 实测结果分析
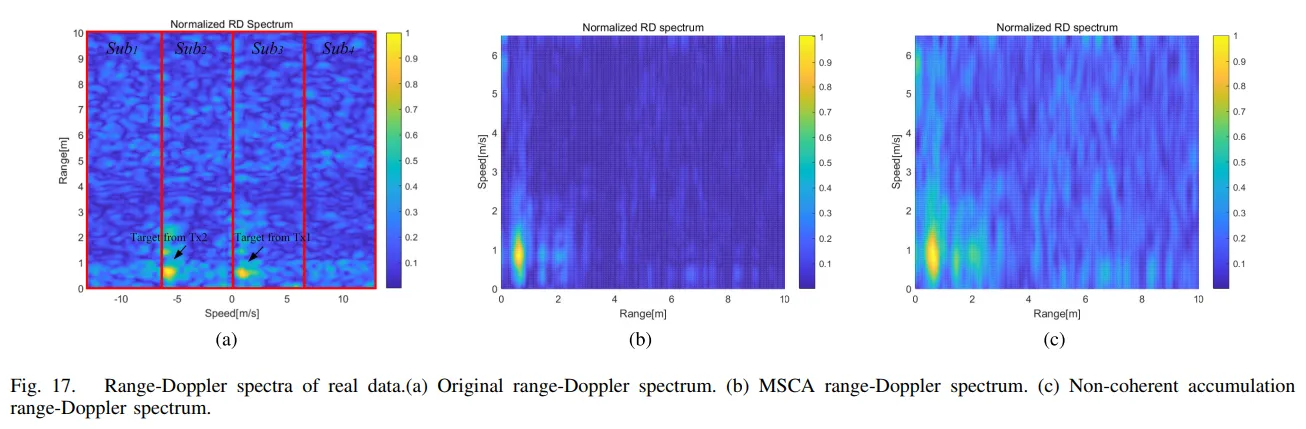
:图17对比了实测数据处理结果。图17(a)原始距离-多普勒谱显示目标淹没在噪声中。图17(b) MSCA处理后,目标清晰可见,背景噪声显著降低。图17(c)非相干累积结果噪声水平仍较高。通过速度校正,成功恢复目标线 m/s。
六、结论本文提出的多子带相干累积算法通过空带插入和子带相干处理,有效解决了DDMA-MIMO雷达的多普勒模糊和能量分散问题。算法创新点包括:
{\max}/M_t]$。C. 空带检测的统计特性设包含目标的子带能量为:
其中$p(xH_0)$为噪声假设下的概率密度。经过相干累积后,检测统计量近似服从非中心卡方分布。
137_安全强化:输入过滤与水印 - 实现输出水印的检测算法与LLM安全防护最佳实践
随着大语言模型(LLM)在各行业的广泛应用,安全问题日益凸显。从提示注入攻击到恶意输出生成,从知识产权保护到内容溯源,LLM安全已成为部署和应用过程中不可忽视的关键环节。在2025年的LLM技术生态中,输入过滤和输出水印已成为两大核心安全技术,它们共同构建了LLM服务的安全防护体系。
双选择性信道下正交啁啾分复用(OCDM)的低复杂度均衡算法研究——论文阅读
本文提出统一相位正交啁啾分复用(UP-OCDM)方案,利用循环矩阵特性设计两种低复杂度均衡算法:基于带状近似的LDL^H分解和基于BEM的迭代LSQR,将复杂度由$O(N^3)$降至$O(NQ^2)$或$O(iNM\log N)$,在双选择性信道下显著提升高频谱效率与抗多普勒性能。
【雷达通信】用于集成传感和通信的OFDM雷达传感算法(Matlab代码实现)
【雷达通信】用于集成传感和通信的OFDM雷达传感算法(Matlab代码实现)
基于ADMM无穷范数检测算法的MIMO通信系统信号检测MATLAB仿真,对比ML,MMSE,ZF以及LAMA
简介:本文介绍基于ADMM的MIMO信号检测算法,结合无穷范数优化与交替方向乘子法,降低计算复杂度并提升检测性能。涵盖MATLAB 2024b实现效果图、核心代码及详细注释,并对比ML、MMSE、ZF、OCD_MMSE与LAMA等算法。重点分析LAMA基于消息传递的低复杂度优势,适用于大规模MIMO系统,为通信系统检测提供理论支持与实践方案。(238字)
MIT与MIT-IBM Watson AI Lab团队提出一种创新方法,在仅256KB SRAM和1MB Flash的微控制器上实现深度神经网络训练。该研究通过量化感知缩放(QAS)、稀疏层/张量更新及算子重排序等技术,将内存占用降至141KB,较传统框架减少2300倍,首次突破设备端训练的内存瓶颈,推动边缘智能发展。
【水下图像增强融合算法】基于融合的水下图像与视频增强研究(Matlab代码实现)
【水下图像增强融合算法】基于融合的水下图像与视频增强研究(Matlab代码实现)
使用哈里斯角Harris和SIFT算法来实现局部特征匹配(Matlab代码实现)
使用哈里斯角Harris和SIFT算法来实现局部特征匹配(Matlab代码实现)
PostgreSQL 物联网应用 - 1 实时流式数据处理案例(万亿每天)
像改PPT一样去复用AIoT解决方案【IoT Studio 1.7上线
友情链接:
